Edtech
Visual Inertial Odometry – definition
Visual Inertial Odometry or VIO is estimating the 3D pose (translation + orientation) of a moving camera relative to its starting position, using visual features. It’s combining visual and inertial measurements. Alternative of technique VIO is Simultaneous localization and mapping (SLAM).
ARKit framework uses Visual Inertial Odometry (VIO) to accurately track the world around it.

TOP 10 VoIP providers for Small Business in 2024
How to fix PII_EMAIL_788859F71F6238F53EA2 Error

How to Set Up Text-to-Speech for Channel Points on Twitch

The Average Size of Home Office: A Perfect Workspace
Top 10 Best Fake ID Websites [OnlyFake?]
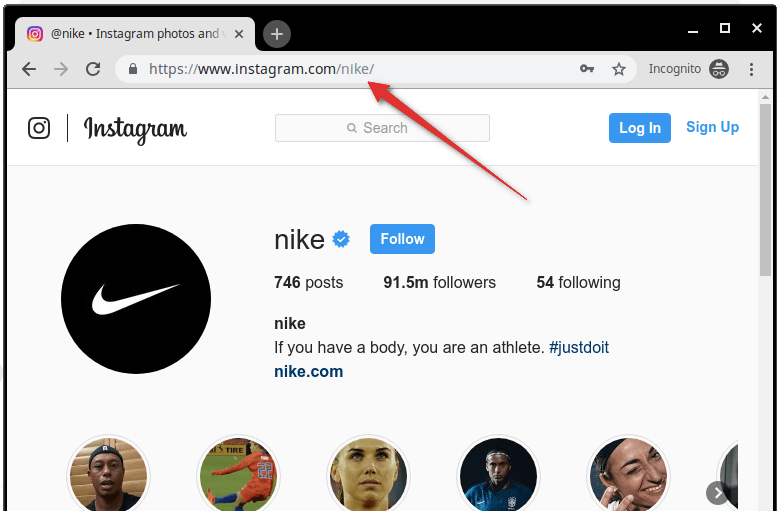
What is my Instagram URL? How to Find & Copy Address [Guide on Desktop or Mobile]

Applob.com Download APK – Tweak your device Safe

About Apple Employee and Friends&Family Discount in 2024
TOP 10 VoIP providers for Small Business in 2024
How to Translate more 5,000 characters limit by Google
-
 Manage Your Business12 hours ago
Manage Your Business12 hours agoTOP 10 VoIP providers for Small Business in 2024
-

 Cyber Risk Management4 days ago
Cyber Risk Management4 days agoHow Much Does a Hosting Server Cost Per User for an App?
-

 Outsourcing Development5 days ago
Outsourcing Development5 days agoAll you need to know about Offshore Staff Augmentation
-

 Software Development5 days ago
Software Development5 days agoThings to consider before starting a Retail Software Development
-
Edtech12 hours ago
How to fix PII_EMAIL_788859F71F6238F53EA2 Error
-
 Grow Your Business4 days ago
Grow Your Business4 days agoThe Average Size of Home Office: A Perfect Workspace
-
Solution Review4 days ago
Top 10 Best Fake ID Websites [OnlyFake?]
-
Business Imprint4 days ago
How Gaming Technologies are Transforming the Entertainment Industry