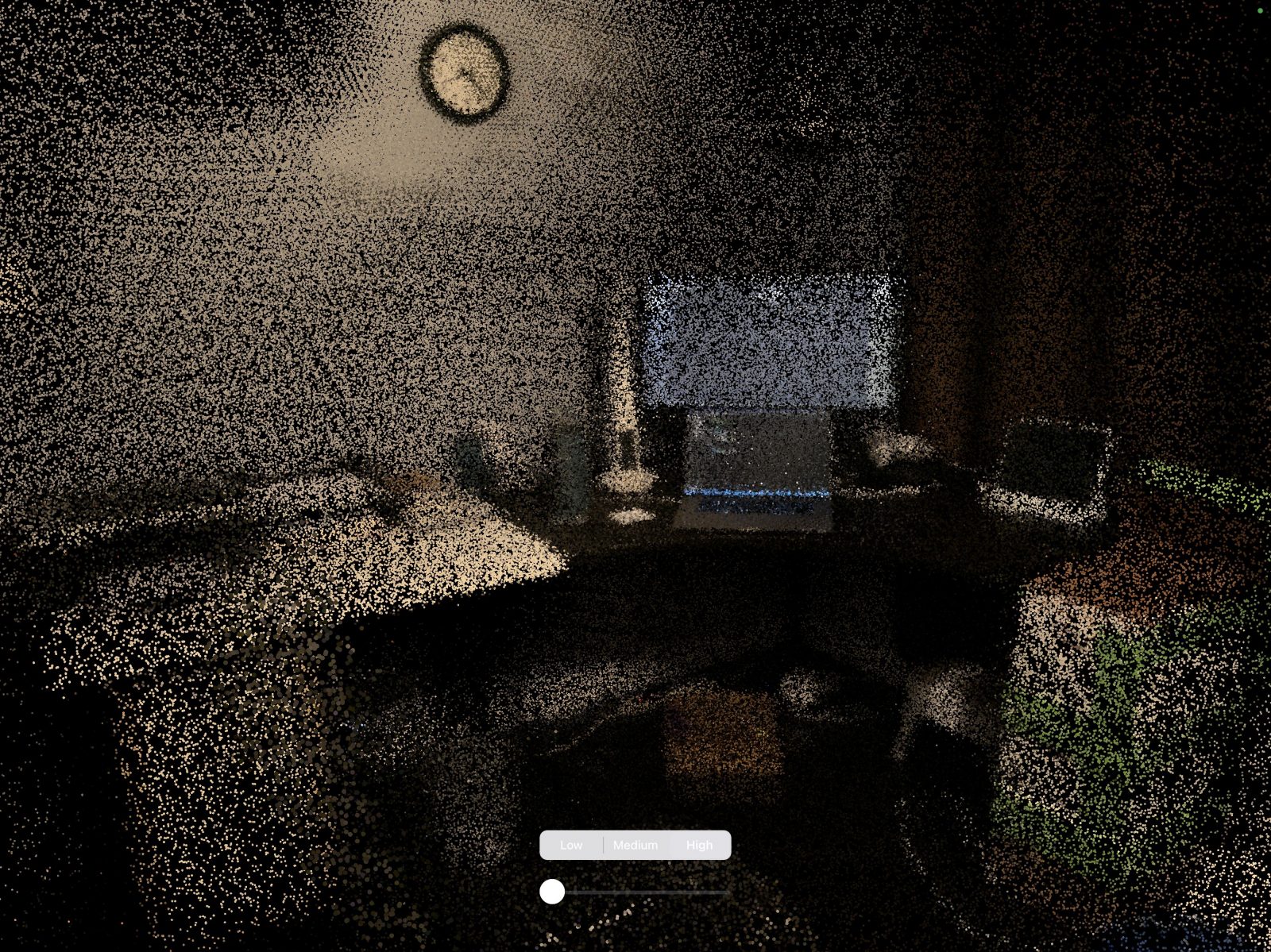
Earlier this year, Apple launched the 2020 iPad Pro with a transformative technology: LiDAR. They simultaneously released ARKit 3.5, which added LiDAR support to iOS. Just...
Recent Comments